打開學理的黑盒子 中央大學團隊打造高穩定度「抗擾」機器手臂
(中央社訊息服務20260415 15:23:21) 
隨著智慧製造與自動化技術的快速發展,機器手臂已成為現代工業與科技領域中不可或缺的重要設備。中央大學電機工程學系吳俊緯副教授團隊,成功將強化學習、傳統控制與先進控制技術進行深度整合,打造出高穩定度的「抗擾」機器手臂,不僅提升機器手臂的精確度,更因扎實的學理基礎與研究創新,使該成果獲刊在國際頂尖期刊IEEE Transactions on Cybernetics。
擁有台積電研發部門經驗的吳俊緯老師表示,這項研究最大的核心理念在於「從學理著手,打開黑盒子」。有別於許多機器手臂研究僅停留在應用端,研究團隊堅持從基本的學理出發,探究機器手臂運作的根本原理與底層邏輯,唯有回歸基本面,才能找到研究創新的價值。
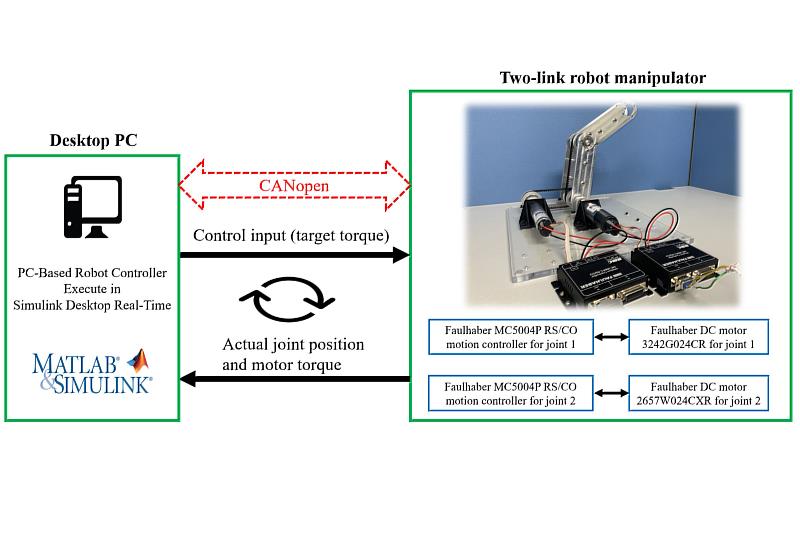
現有的機械手臂在實際應用常面臨各種環境的不確定性、外部干擾以及高精度控制等需求的嚴峻挑戰。為徹底掌握技術,研究團隊堅持不使用市售展示用的機器手臂,秉持「從零開始」,親自設計打造機器手臂,並編寫運作程式,進而提出一套兼具穩定性與高性能的精確控制策略,並在多個面向展現創新突破。
研究所提出的控制方法不需要高度依賴精確的數學模型,即使在環境不確定或系統高負載變化的情況下,仍能維持良好的控制效果,可以大幅度地提升機械手臂的適應能力與穩定性。其次,提出新穎的擾動觀測器設計架構,解決傳統方法只能處理較單一的干擾問題,能更快速且準確地應對突發或變動的干擾情況,進一步提升控制精度與系統穩定性,同時降低對複雜感測與計算的依賴。
最後,再結合行動者(Actor)-評論者(Critic)的人工智慧架構,讓系統一邊學習如何評估控制效果,一邊學習如何產生最佳控制策略。並且透過結合傳統控制原理作為初始基礎,來大幅減少實務上需要反覆調整參數的問題,使系統更容易被設計且動作可以更快達到穩定狀態,為未來發展高度自主性機器人奠定重要研究基礎。